BTS CPI 2017
______
EPREUVE E4 - MOTORISATION DES SYSTEMES
Durée : 3 heures
Support
Chaîne de traitement de surface
Mise en situation
La société RADIALL située en Isère est spécialisée dans la conception et la fabrication de connecteurs pour des applications telles que le médical, l’aéronautique civile et militaire, ou les télécommunications. Les connecteurs subissent un traitement de surface destiné à améliorer leurs propriétés mécaniques et électriques.
Nous allons nous intéresser ici à la chaîne de traitement de surface.
Elle se compose d’un portique constitué de deux poutres de 20 m en IPE220 sur lesquelles se déplace horizontalement un robot.
Après avoir paramétré différentes données, l’opérateur lance le cycle permettant de déplacer les tonneaux contenant les connecteurs dans différentes cuves (chargement, dégraissage, opérations de rinçage, cuivrage et déchargement).
Présentation
L’étude portera sur la phase de dépôt de cuivre dans la cuve N°6. Le traitement est de type électrolytique.
Le robot est muni de deux actionneurs électriques de type moteur asynchrone triphasé :
- un moteur permet le levage des tonneaux par l’intermédiaire d’un réducteur non-réversible ;
- un moteur assure la translation du robot par l’intermédiaire d’un réducteur réversible. Il est équipé d’un frein à manque de courant permettant un blocage après positionnement précis du robot au-dessus de la cuve choisie ;
- les mouvements de levage d’un tonneau et la translation du robot ne s’effectuent pas simultanément.
Les deux moteurs sont pilotés par un variateur de vitesse commun permettant des déplacements à des vitesses différentes.
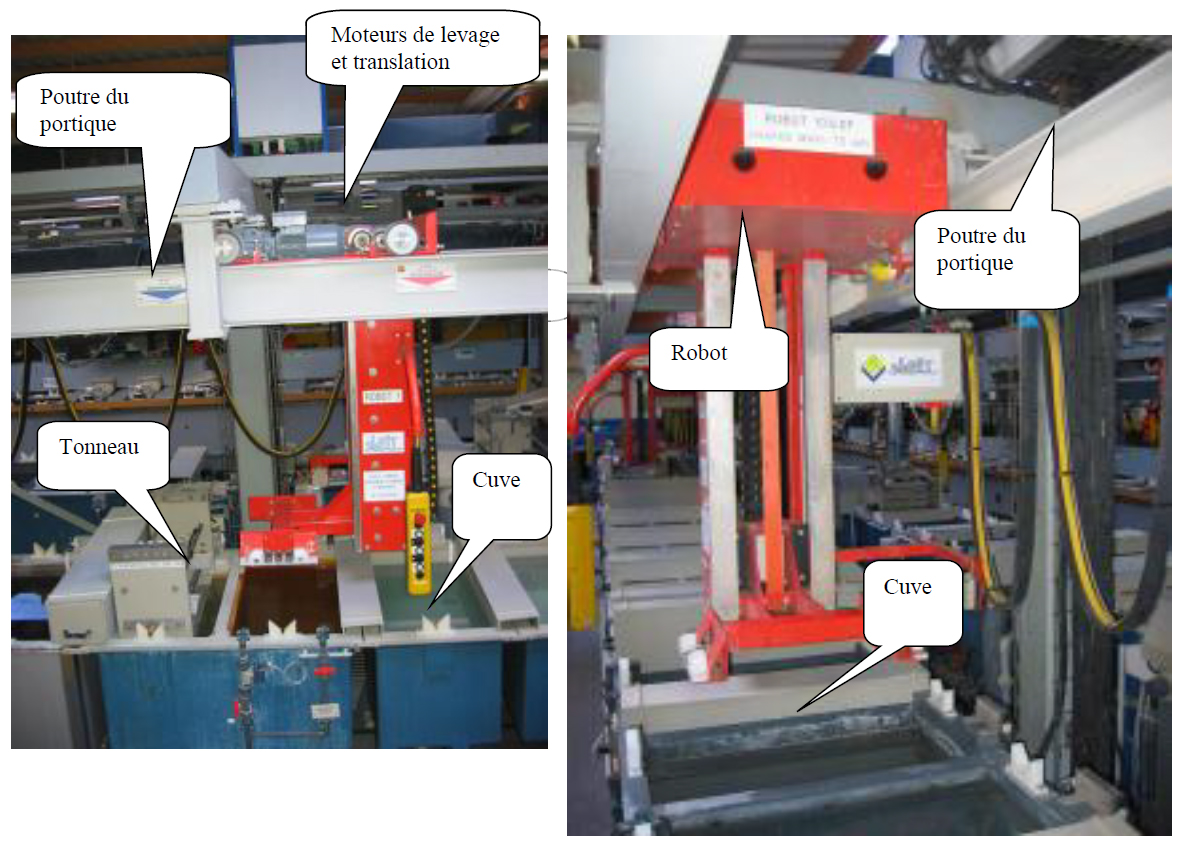
Robot sans prise de tonneau
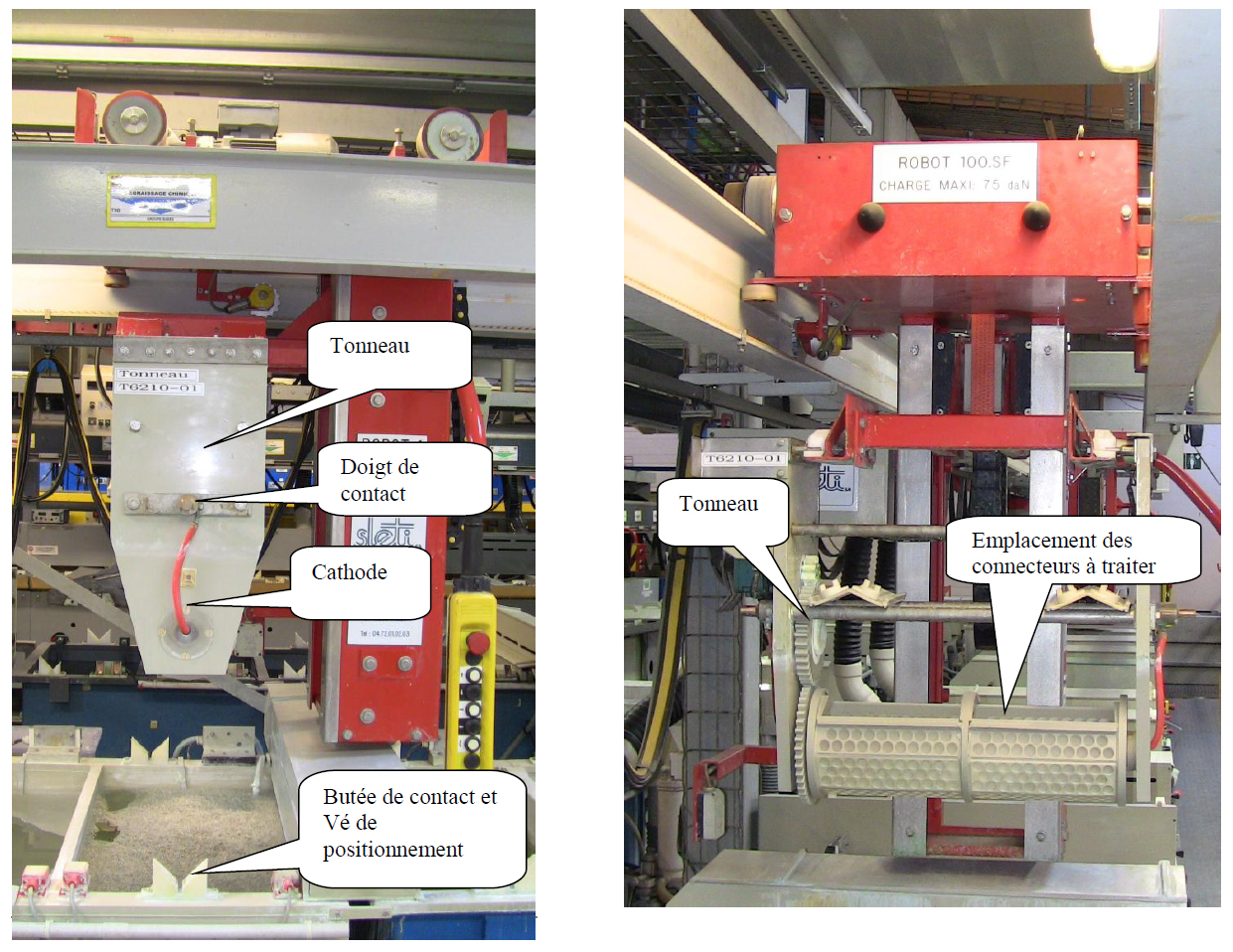
Robot avec prise de tonneau
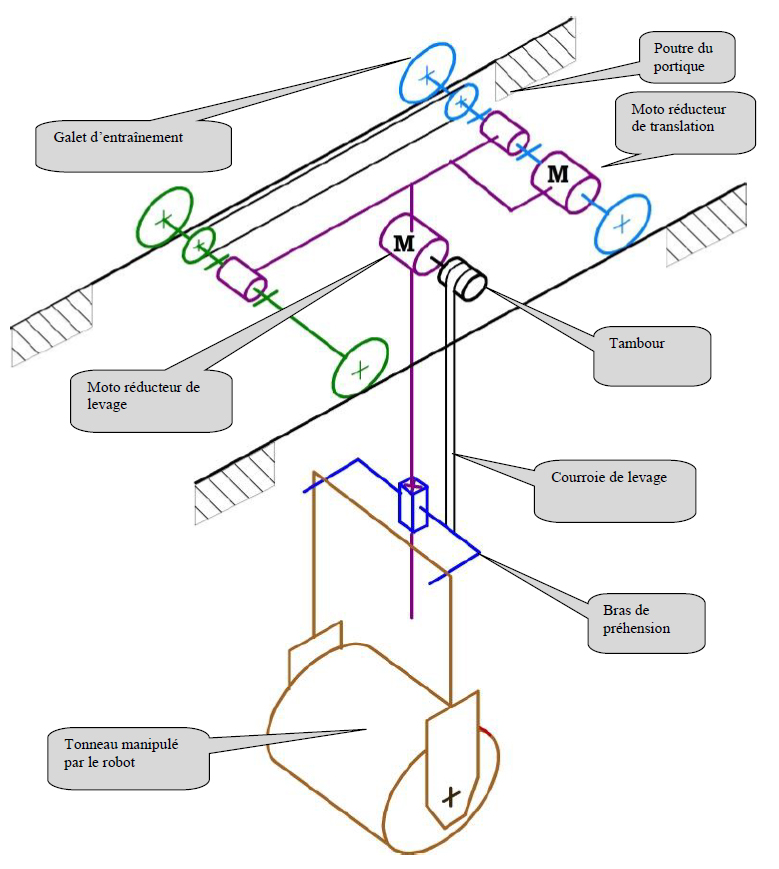
Schéma cinématique du robot
Activités proposées
Étude des électrolyseurs
- Étude de l’électrolyse
Objectif : calculer le temps de trempage pour déposer une épaisseur de 2 microns de cuivre sur des connecteurs en laiton
- Dimensionnement des protections électriques des départs pour électrolyseurs
Objectif : dimensionner les protections électriques en amont des redresseurs de type alimentation à découpage.
Étude de la motorisation de levage du robot
- Dimensionnement du moteur de levage
Objectif : valider le choix du moteur de levage.
- Étude d‘un nouveau point de fonctionnement du moteur de levage
Objectif : déterminer la fréquence f des tensions délivrées au moteur afin de ralentir le déplacement vertical à l’approche des connecteurs du bain électrolytique.
- Étude de la réversibilité énergétique
Objectif : étudier les quadrants de fonctionnement du moteur de levage durant un cycle de montée, descente.
Étude de la translation horizontale du robot
- Quadrants de fonctionnement du moteur de translation
Objectif : étudier les quadrants de fonctionnement du moteur de translation durant un cycle afin de valider la nécessité d'une résistance R de dissipation de l'énergie entre les bornes 81 et 82 du variateur de vitesse.
- Vérification du fonctionnement du moteur de translation
Objectif : Déterminer le temps que met le robot pour parcourir la distance entre deux cuves
Acquisition de la position du robot
- Objectif : Dimensionner le capteur de position du robot

