Présentation du projet
Le robot suiveur de ligne est un projet destiné au Bac PRO Microtechniques. Ce projet a pour objectifs de favoriser le travail de groupe, de permettre aux élèves la réalisation de l'intégralité du robot, et enfin, de valider les compétences et savoir-faire professionnels ainsi que quelques compétences transversales.
Les étapes du projet
Temps 1 : ÉTUDE DU PROJET
- Formulation du besoin
- Élaboration du cahier des charges
- Revue de projet
Temps 2 : CONCEPTION MÉCANIQUE
- Modélisation des pièces constituant l’intégralité du châssis (décomposé en plusieurs modules pour faciliter la modélisation)
- Modélisation des supports (roues arrière, plaque LAB, roue libre, détecteurs piste et ultrason)
- Modélisation des roues arrière avec liberté de conception (diamètre extérieur et épaisseur du moyeu imposés)
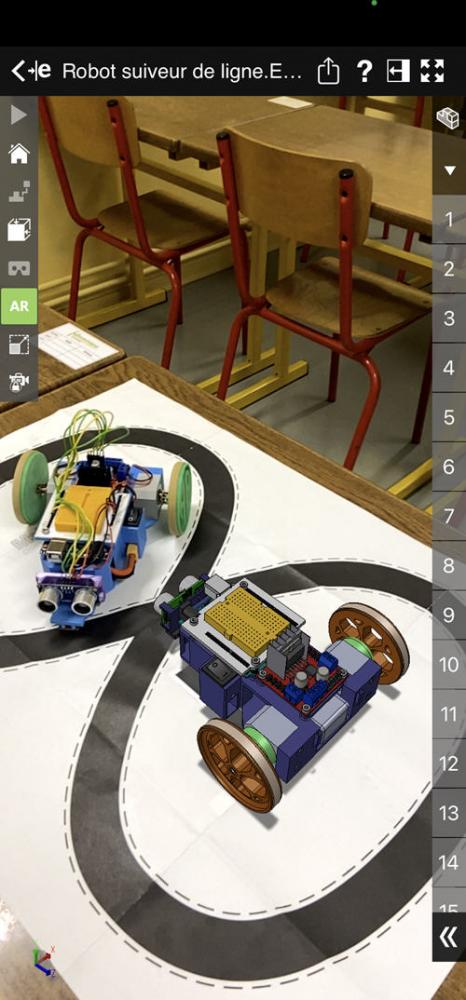
- Assemblage sous contraintes dans son intégralité de tous les éléments constituant le robot suiveur de ligne
- Rendu en réalité augmentée via l’application eDrawings de SolidWorks
- Revue de projet
Temps 3 : PRODUCTION MÉCANIQUE
- Impression des pièces plastiques
- Usinage des supports des motoréducteurs en alliage d’aluminium
- Usinage des bagues épaulées des roues arrière en alliage de cuivre
- Réalisation des taraudages du châssis
- Revue de projet
Temps 4 : ÉLECTRONIQUE (Puissance, actionneurs et détecteurs)
- Étude du module L298N et motoréducteurs
- Couplage du module avec la carte Arduino
- Comprendre le principe de mesure par ultrason
- Câblage de l’ultrason
- Comprendre le principe des détecteurs « suiveur de ligne »
- Câblage des détecteurs
- Revue de projet
Temps 5 : ASSEMBLAGE MÉCANIQUE, ÉLECTRIQUE ET ÉLECTRONIQUE
- Assemblage mécanique du robot
- Implantation des modules électroniques
- Élaboration du programme
- Transfert du programme
- Revue de projet
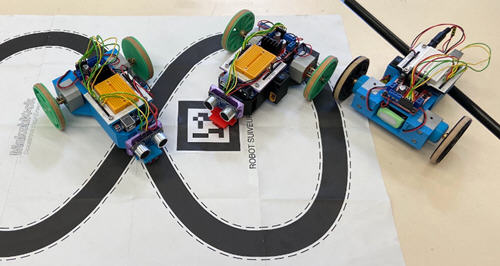
Temps 6 : TEST DE FONCTIONNEMENT
- Test de fonctionnement du robot suiveur de ligne sur piste
- Analyse et correction des dysfonctionnements éventuels
- Bilan de projet


