Cette ressource présente un exemple d'intégration de robotique au sein d'une cellule de production.
Ce projet a été conduit dans le cadre de la licence professionnelle Implantation, Conduite et Maintenance d’Installation Robotisée (ICMIR), au lycée Kastler à La Roche/Yon (85).
Contexte
La cellule existante a pour but d’usiner des pièces en matériaux composites de dimension 1500x1500x1500. Elle est équipée d’un outillage de positionnement de la pièce amovible. Le robot se situe dans une enceinte fermée.
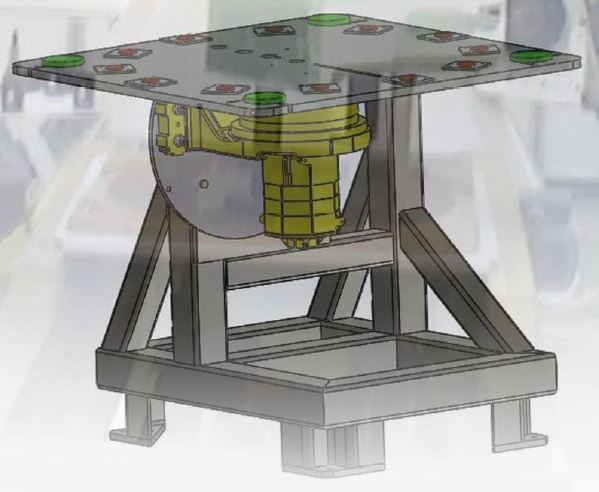
Dans le cadre de la finalisation du projet POMOROB, la PFT85 (Plateforme technologique de Vendée) a fait l’acquisition d’un positionneur associable à un robot (septième axe).
Ce positionneur doit être mis en oeuvre au niveau de l’installation qui comporte un robot M710iC. Ce matériel a la capacité d’embarquer une charge pouvant aller jusqu’à 1500Kg. Ce périphérique destiné aux robots Fanuc est un axe supplémentaire déjà équipé d’un motoréducteur et de l’ensemble des dispositifs nécessaires à son raccordement au contrôleur robot. Prêt à être intégré, ce positionneur peut manipuler de grandes pièces de travail rapidement et avec précision.
Projet tutoré mené par :
Raynald Michaud, étudiant en licence professionnelle Implantation, Conduite et Maintenance d’Installation Robotisée, au lycée Kastler à La Roche/Yon