1 PRÉSENTATION
Le télescope T1M est installé sur l'observatoire du Pic du Midi de Bigorre dans le département des Hautes-Pyrénées. L’observatoire est situé à 2877 mètres au dessus du niveau de la mer, au centre de la chaîne pyrénéenne, largement au dessus des sommets proches (le sommet à proximité le plus haut est à 2400 m), à 0,09° de longitude Est et à 34,04° de latitude Nord. Cette situation exceptionnelle a permis depuis plus d'un siècle aux astronomes d’y étudier la Lune (l’observatoire a participé à la préparation des missions Apollo pour la NASA), le Soleil, les planètes, les étoiles et les galaxies, les physiciens y analysent l'atmosphère (gaz à effet de serre et ozone) et une antenne de Télédiffusion de France (TDF) permet d'émettre les signaux TV et radio pour une large région Sud Ouest.
Le télescope T1M est actuellement destiné à l'étude des planètes du système solaire. Des chercheurs se relaient tout au long de l’année pour observer, de nuit exclusivement, les étoiles, les comètes et les constellations.
Le télescope d’observation est supporté par une table équatoriale, voir figure 1 page 2/15. Le plan de la table est parallèle au plan de l’équateur afin que son axe de rotation appelé « ascension » soit parallèle à l'axe de rotation terrestre (axe Nord Sud).
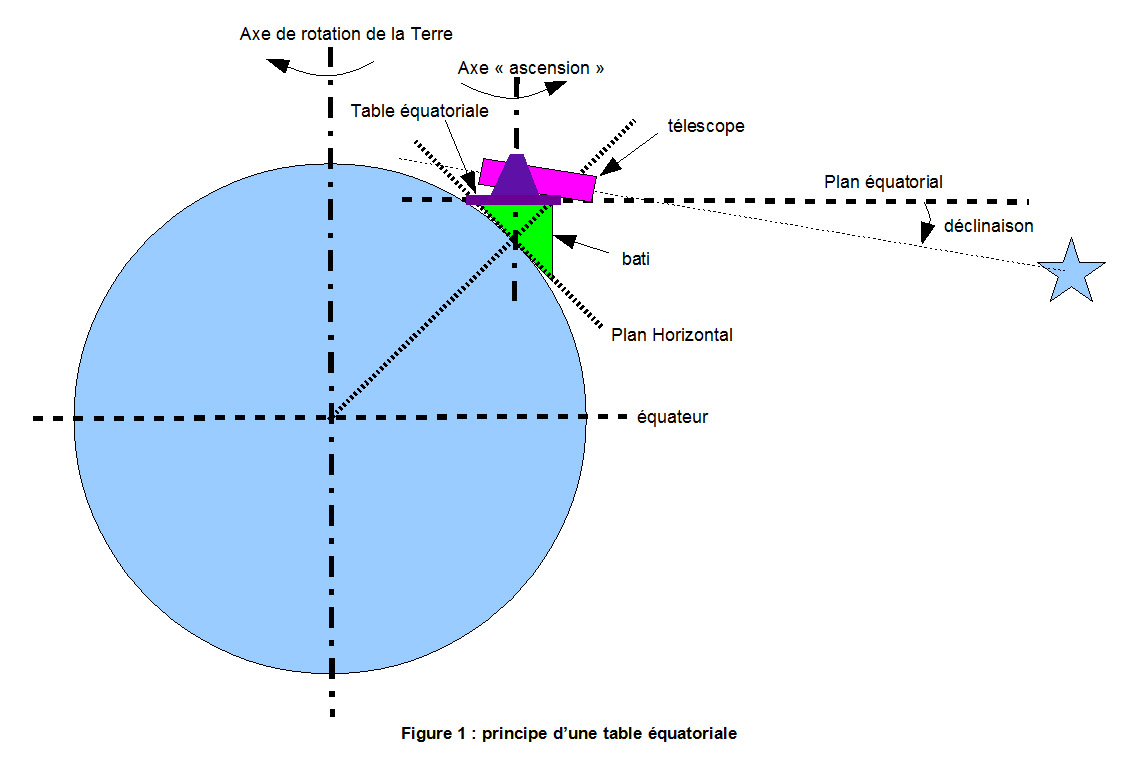
Le télescope a deux axes de rotation :
- L’axe « ascension » permet :
- en début d’observation, d’amener le télescope à la position voulue (pointage à grande vitesse) ;
- au cours de l'observation, de compenser la rotation de la Terre et donc d'observer en permanence l'étoile (suivi à petite vitesse).
- Le second axe « déclinaison » permet de régler l'altitude de l'étoile. Cette altitude évolue dans l'année à cause des mouvements des planètes (y compris la Terre) mais ne change pas lors d'une observation nocturne
La motorisation de l’axe « ascension » est actuellement réalisée par :
- un moteur asynchrone en alimentation directe pour le pointage à grande vitesse en début d'observation ;
- un moteur pas à pas pour le suivi à petite vitesse au cours de l'observation (compensation de la rotation de la Terre).
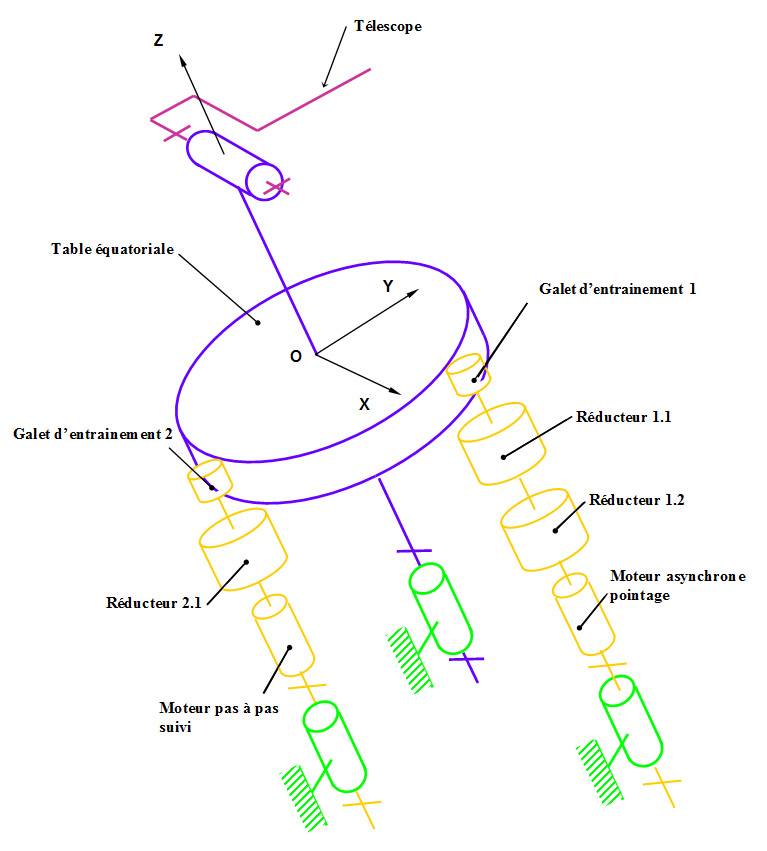
Figure 3 : schéma cinématique du télescope actuel
2 OBJECTIFS DE LA RÉNOVATION
Le projet consiste à automatiser les mouvements du télescope afin de pouvoir mener les observations, donc diriger le télescope, à distance. Cela se traduit, entre autres, par l’utilisation d’un moteur unique alimenté par un variateur de vitesse pour le pointage et le suivi sur l’axe « ascension » (partie 1), la mise en place de capteurs de position afin de connaître la direction pointée (ascension et déclinaison), de température et d’hygrométrie au niveau du miroir principal du télescope (partie 2).
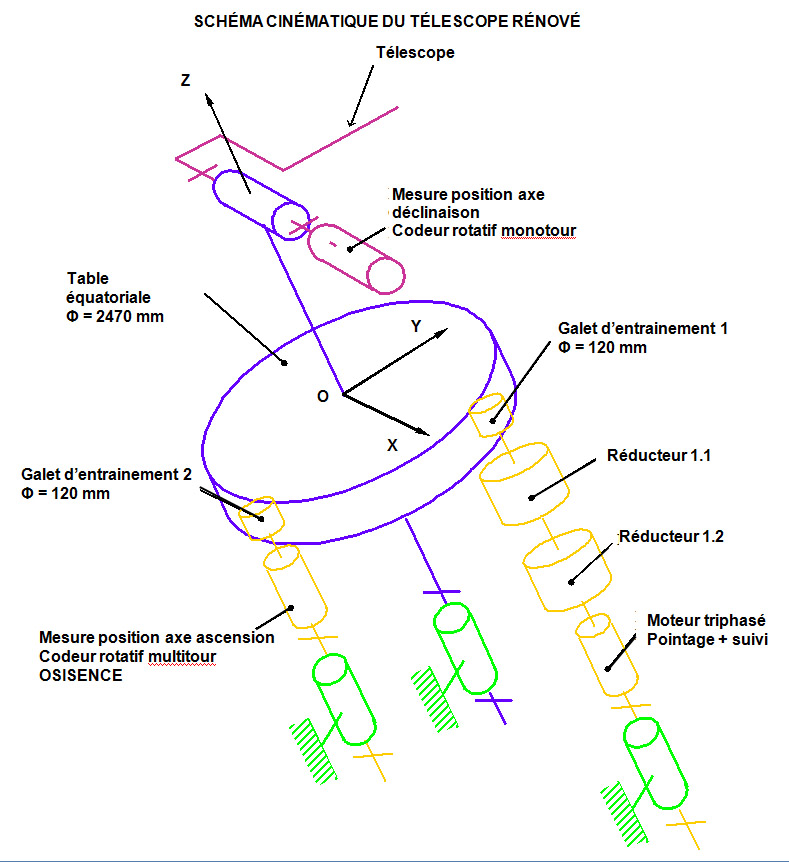
Figure 4 : schéma cinématique du télescope rénové
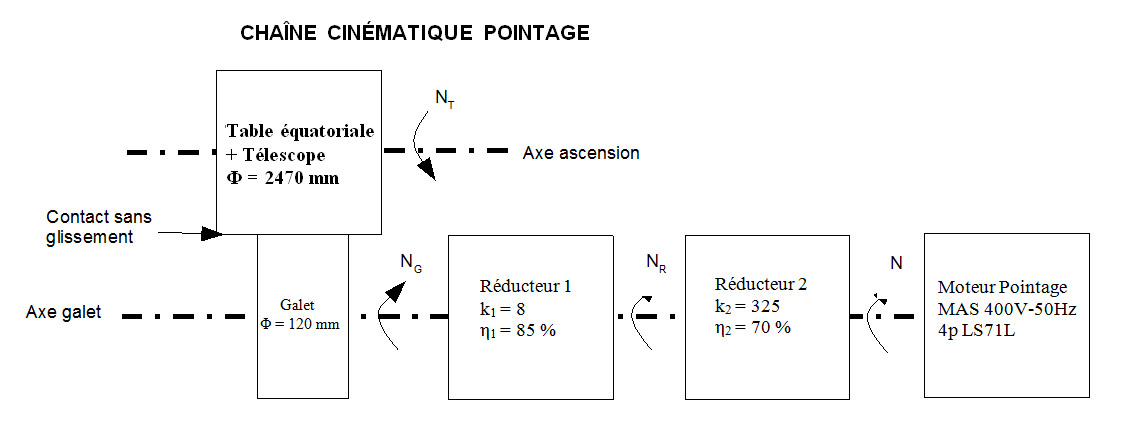
Figure 5 : chaîne cinématique Pointage
Le contact entre les galets et la table équatoriale se fait sans glissement.
Le rapport de réduction k des réducteurs est défini comme étant le rapport de la plus grande vitesse sur la plus petite.
Le rendement η des réducteurs est défini comme étant le rapport entre la puissance à fournir côté partie opérative et la puissance fournie côté moteur.



