Agrégation concours externe
Section : Sciences Industrielles de l’Ingénieur
Épreuve d'admissibilité
Option sciences industrielles de l'ingénieur et ingénierie mécanique
Support : Pont roulant 30T
Contexte
Le déplacement de pièces est un besoin courant dans l’industrie. Si le plus simple semble être d’utiliser des convoyeurs type tapis roulant ou chariot sur rail, de nombreuses situations imposent de soulever puis déposer les pièces : disposition de l’usine, besoin de maîtrise de l’orientation, impossibilité d’interfacer deux parties d’une ligne de production, etc. Il faut alors utiliser un système muni d’un préhenseur (pince, crochet, préhenseur pneumatique, etc) et d’un mécanisme motorisé (souvent robotisé) capable de déplacer ce préhenseur selon les degrés de liberté nécessaires.
Bien que les phases de transport ne soient pas des phases de fabrication à proprement parler (elles n’engendrent pas de modification de la matière transportée), elles ont un impact non négligeable sur le process industriel. En effet, ces phases de transports représentent un certain temps. Il est donc généralement important, pour augmenter la cadence et ainsi faire baisser les coûts de production, de pouvoir transporter des charges le plus rapidement possible. Les pièces de petites dimensions se prêtent assez bien à ce type de manipulation, leur faible masse engendrant des effets d’inertie limités même à grande vitesse. En revanche, dans le cas d’objets plus massifs, les effets de leur inertie doivent être pris en compte dans le dimensionnement et la commande des systèmes de transport.
Le bon dimensionnement des systèmes de transport de charge lourde est d’autant plus critique qu’une défaillance peut se traduire par des conséquences dramatiques. Des normes régissent les performances attendues notamment en situation d’urgence (comme une panne d’alimentation en énergie par exemple), ainsi que les dispositifs de sécurité à intégrer au système et les coefficients de sécurité à appliquer tout au long du processus de dimensionnement.
Un transport d’objet peut se décomposer en plusieurs phases : la prise de l’objet, son transport proprement dit et sa dépose. La phase de transport doit se dérouler de manière sécurisée, ce qui implique une connaissance et une maîtrise de la position de l’objet transporté à tout instant. La phase de prise de l’objet impose de maîtriser la position du préhenseur afin de saisir l’objet de façon satisfaisante, il s’agit de le déplacer sans le relâcher ni l’abîmer. Ce besoin de maîtrise est d’autant plus crucial lors de la phase de dépose de l’objet car elle doit se faire dans une position précise pour permettre aux opérations suivantes de se dérouler de façon optimale (qu’il s’agisse de fabrication ou de stockage).
Comme évoqué plus haut, la manipulation de charges importantes présente des problématiques particulières car les effets inertiels, tout comme les déformations sous charge, ne sont plus négligeables. Il est donc nécessaire de modéliser ces effets afin d’assurer le bon dimensionnement du système d’une part, et la maîtrise de la position de la charge d’autre part. Ces deux points sont cruciaux pour assurer la sécurité des biens comme des personnes lors de l’utilisation du pont roulant.
Architecture globale du système
Le système, représenté sur la figure 1 ci-dessous, est constitué d’un chariot guidé le long de poutres ou « portées ». Les poutres sont reliées entre-elles par deux sommiers, chacun étant guidé le long d’une poutre de roulement.
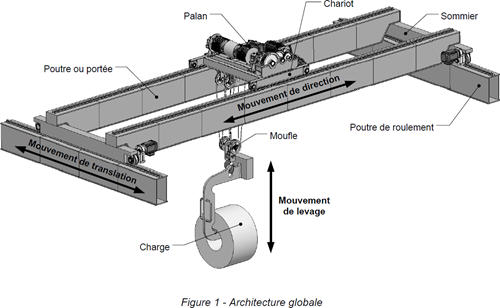
La charge à soulever est suspendue à un crochet. Celui-ci est lié à un mouflage constitué de deux moufles (une moufle est un assemblage de plusieurs poulies) permettant de réduire la tension dans les deux câbles. Le levage s’effectue grâce à l’enroulement de ces câbles sur un tambour entraîné par un moteur électrique (palan).
La conception et le comportement du système de translation sont très dépendants de l’installation sur site du système, on ne les étudie pas ici.
L’annexe 1 contient une description structurelle du pont roulant où figurent de nombreuses informations utiles à la réalisation des différentes études.
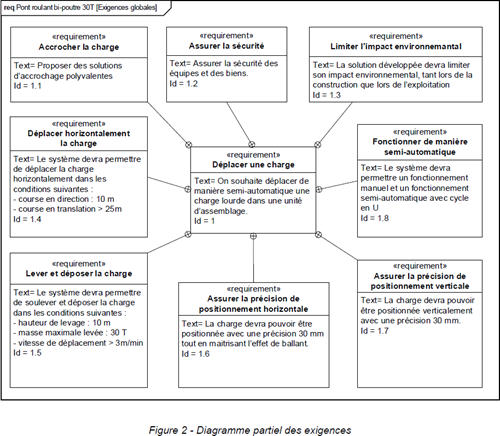
Exigences globales du système
Les principales exigences liées à l’utilisation de ce système sont présentées sur la figure 2 ci-dessous. Un diagramme des exigences plus détaillé est fourni en annexe 2, dans lequel seules les fonctions utiles aux études traitées dans ce sujet sont développées.
Présentation des problématiques et de l’objectif général du sujet
Les quatre parties qui composent ce sujet ont pour objectif d’analyser trois points particulièrement critiques pour la sécurité des biens et des personnes au voisinage du pont roulant : la tenue de certaines pièces critiques sous charge, l’erreur de positionnement de la charge et le dimensionnement de la chaîne de levage. On s’intéresse également à l’établissement de modèles qui permettent la mise en place d’une commande appropriée (non traitée dans ce sujet).
Les différentes parties se focalisent sur un sous-système et une phase de fonctionnement du pont roulant en traitant un ou plusieurs des points critiques ci-dessus. Chacune vise un objectif qui participe à la sécurité des biens et des personnes au voisinage du pont roulant :
- la première partie, dépourvue de questions, permet de s’approprier le sujet et le contexte d’étude ;
- la deuxième partie a pour objectif de vérifier le bon comportement statique du système de levage ;
- la troisième partie porte sur le comportement dynamique du système de levage et en particulier sa motorisation et son freinage ;
- la quatrième partie du sujet s’intéresse quant à elle au comportement dynamique du pont roulant dans le mouvement de direction.
