CAPET concours externe
Section : Sciences Industrielles de l’Ingénieur
Épreuve d'admissibilité
Option ingénierie mécanique
Support : Système ROV
Présentation
1. Parc éolien
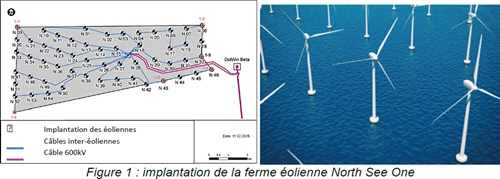
Le développement de fermes éoliennes en mer nécessite la pose de câbles sous-marins de forte puissance sur de très grandes distances. Le déploiement de ces câbles doit se faire en tenant compte de contraintes environnementales sévères visant à limiter l’impact sur le milieu marin. Les opérateurs « offshore » ont constaté une élévation de la température de l’eau autour du câble provoquant le développement de micro-organismes.
Pour limiter ce phénomène, la solution est d’ensouiller (enfouir) le câble dans les sédiments terrigènes des plateaux continentaux.
La société Louis Dreyfus TravOcéan a acquis au fil des années une expertise unique dans les domaines de la pose et de la protection de câbles sous-marins, couvrant en particulier tous les types de sol (du sol très meuble au sol très dur) ainsi que tous les types de câbles (fibre optique, câbles électriques, ombilicaux).
2. Choix de la profondeur d’ensouillage
La société TravOcéan a fait appel à une société spécialisée FIELAX dans la simulation des températures des sédiments et de l’influence de l’ensouillage des câbles. À partir de nombreuses mesures thermiques dans différents environnements marins, elle a développé des logiciels de simulation prenant en compte les différents points suivants :
- influence du climat sur la température des eaux de fond ;
- propriétés thermiques des sédiments ;
- caractéristiques des câbles ensouillés.
Dans les mers peu profondes, les mers du Nord et Baltique, la température des eaux de fond est sensible aux saisons. Une campagne de mesures de cette température a permis de réaliser une modélisation
3. Le système ROV (Remotely Operated Vehicle)
La société TravOcéan a été un acteur majeur de la création du parc éolien North See One, décrit figure 1. Dans ce projet, support de cette étude, 62 km de câbles ont été ensouillés par une profondeur de 30 m d’eau à l’aide d’un robot ROV dont les caractéristiques sont données figure 2. Les conditions climatiques extrêmes de la mer du Nord nécessitent une grande maîtrise des opérations, en particulier lors des phases de mise à l’eau et de descente en pleine eau.

Les opérations de mise en oeuvre du robot ROV utilisées pour l’ensouillage se font en trois étapes distinctes définies par les trois cas d’utilisation. Ils seront étudiés dans les différentes parties du sujet dans l’ordre des opérations nécessaires à l’ensouillage.
Cas d’utilisation n°1 : mise à l’eau
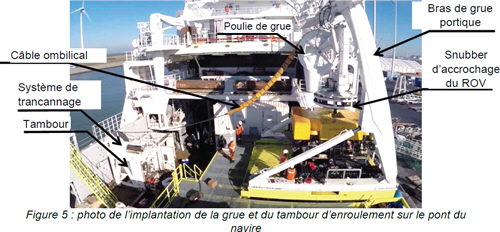
Cette phase utilise une grue portique pour transférer le ROV du pont du navire jusqu’à l’aplomb de la surface d’immersion (voir figure 4). Dans cette phase le ROV n’est pas porté par le câble ombilical mais par un dispositif d’accrochage spécifique appelé snubber (voir figure 5).
Cas d’utilisation n°2 : descente en pleine eau
Dans cette phase le ROV est suspendu au câble ombilical. Un bon équilibrage hydrostatique est nécessaire pour assurer l’horizontalité du ROV pendant la descente.
Cas d’utilisation n°3 : ensouillage ou enfouissement du câble
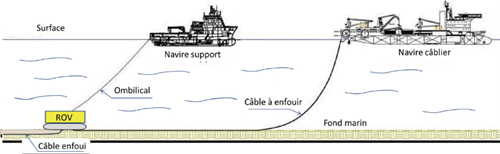
Dans cette phase le ROV est posé au fond de la mer. Il devra détecter le câble, s’aligner et commencer l’enfouissement en creusant une tranchée à l’aide des hydrojets.
Pour réaliser l’ensouillage, le câble est déposé sur le fond marin par un navire câblier. Le ROV est déposé sur le fond marin par un navire support et ensouille le câble après l’avoir détecté et s’être aligné dans l’axe de celui-ci (voir figure 3).
4. mise à l’eau du ROV
Le ROV est amené sur le site par un navire support. La mise à l’eau est faite à partir d’une grue portique embarquée (voir figure 4).

Le câble ombilical est enroulé sur un tambour motorisé équipé d’un système de trancannage - opération de va et vient nécessaire au bon enroulement d’un câble sur une bobine - (voir figures 5 et 6). Il est raccordé au ROV par un snubber de jonction. La grue portique est actionnée par deux vérins hydrauliques.

Les conditions de houle et la masse importante du robot (13 tonnes) impliquent un dimensionnement précis des éléments défini par la norme « Cranes and Submersibles Lifting Appliances » qui impose des coefficients de majoration pour prendre en compte des effets dynamiques dus à une houle donnée.
La grue portique et les éléments de levage sont conçus pour être homologués avec une houle de 5 m.
Conditions d’étude :
- les effets de la houle impliquent une majoration de 100 % des efforts statiques ;
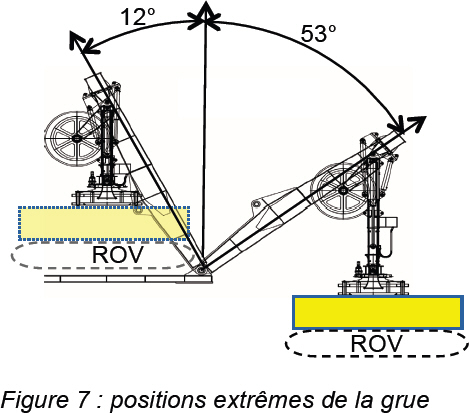
- le portique se déplace entre −12° et 53° par rapport à la verticale.
La grue portique permet le transfert du ROV entre la surface et le navire. Dans cette phase le ROV est relié au snubber (voir figure 7). Le câble n’est plus porteur.
Composition du sujet :
Le sujet comporte plusieurs parties ayant pour objectifs :
- de comprendre pourquoi la société TravOcéan a choisi d’ensouiller le câble à une profondeur de 1,5 m.
- de vérifier le dimensionnement de la grue portique permettant la mise à l’eau du ROV.
- de vérifier le bon dimensionnement du système de trancannage.
- de vérifier la flottaison nulle du ROV totalement immergé.
- de vérifier la résistance au matage (compression) du câble lors de son plaquage dans la tranchée.
- de vérifier le dimensionnement de l’ensemble moteur-pompe haute pression et les « thrusters » (propulseur hydraulique) permettant d’assurer le plaquage dans les fonds marins du ROV.
- de synthétiser les différentes opérations nécessaires à la mise en oeuvre du ROV.
 [2]
[2] [6]
[6] [8]
[8] [9]
[9]